一、团队基本情况
负责人:钟秋波
研究方向与研究特色:
1. 仿人机器人复杂运动规划与协同控制
2. 基于强化学习的人形机器人智能控制
3. 仿生机械
4. 人工智能与康复技术
5. 机器视觉、机器学习算法
6. 仿人机器人学习与认知
7. 元启发式优化算法和模型预测控制
依托资源:
1. 学科:控制科学与工程、机械工程为宁波市重点建设学科
2. 科研机构:宁波工程学院智能技术交叉研究院
主要服务社会领域及能力水平:
1. 服务领域:人形机器人研发与制造、自动化柔性制造
2. 能力水平:市内领先、省内知名,国内有影响力
二、团队核心成员
钟秋波、张海运、修豪华、关超、杨蕊、徐嘉宏、米肖肖
三、代表性成果简介
1. 仿人机器人复杂运动关键技术研发
以稳定控制不确定环境下人形机器人复杂运动控制,实现特定领域的特定任务和全身运动。主要围绕不确定环境下的基于强化学习的人形机器人复杂运动规划:包括上身规划、下身运动和全身运动规划研究。基于传感器反馈的人机交互任务,实现基于学习的人形机器人自身关节轨迹步态规划和复杂环境下的运动规划。通过强化学习,从机器人全阶动力学出发,实现完备和精确的控制方案,利用蒙特卡洛采样收集数据,对大规模模拟数据的学习来建立控制逻辑,为面向下一代、适应高自由度系统和复杂场景的控制算法提供最优解。
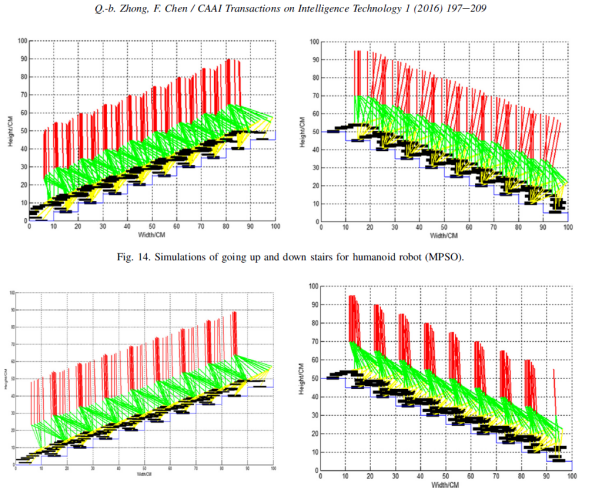
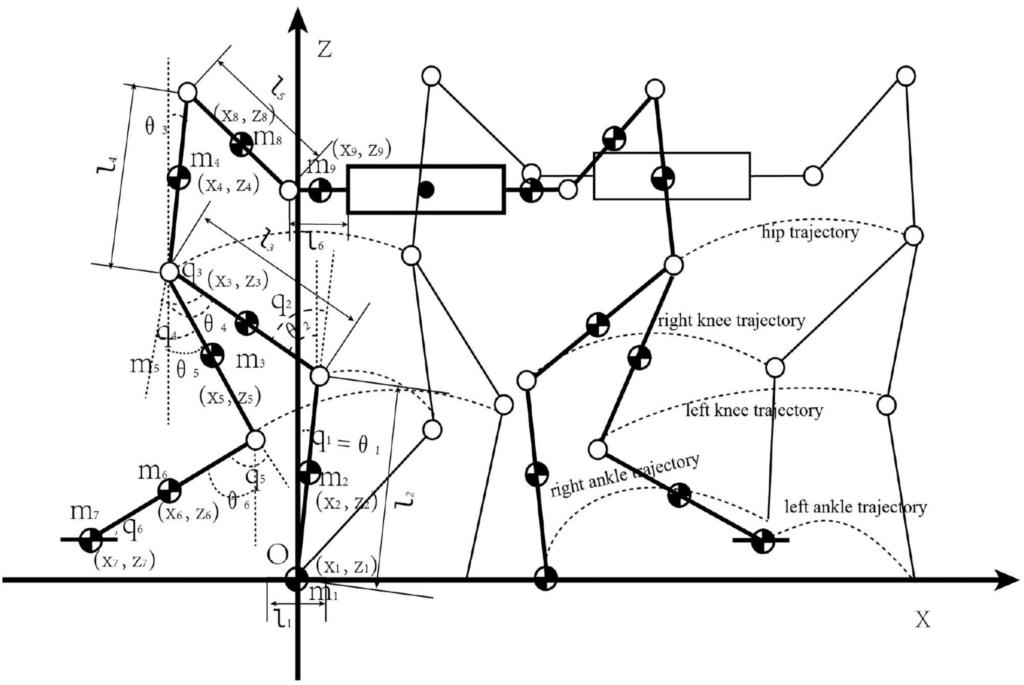
图1 人形机器人上下楼梯与协作运动轨迹架构与仿真图
2. 团队针对机器人未知动力学、动态不确定性和外部扰动条件下非线性系统稳定精准控制问题,提出了基于自组织模糊规划的机器人关节自适应鲁棒同步控制方法,实现动力学不匹配和运动学偏差影响下异构非线性轨迹精准跟踪同步与自适应收敛。

图2 机器人关节自适应鲁棒同步控制框架及效果
3. 团队针对机器人关节位置和力矩耦合约束及关节空间冗余度下自主稳定作业规划问题,提出了基于运动学-动力学齐次加权范数的机器人支链齐次加权范数速度重配规划方法,实现机器人关节位置-力矩耦合极限约束下机器人关节自主稳定运动规划与平滑优化。

图3 机器人运动支链齐次加权范数速度重配规划框架及效果
4. 被动型双自由度假肢踝关节
针对现有假肢踝关节及脚板不具有冠状面内运动自由度的问题,设计并开发出基于4-4R并联机构的双自由度柔性假肢踝关节,性能试验和患者临床试验表明,其可提供足够的双自由度运动范围,并在平路行走中,有效增强截肢患者的路面适应性与运动舒适性。

图4 被动型双自由度假肢踝关节示意图:净重1.05 kg,假肢踝关节高度93 mm,
假肢踝关节+脚板的高度为157 mm,宽度为76.5 mm

